
我院副教授金浩在电机控制领域取得重要进展,相关研究成果Dynamic Adaptive Correction Strategy for Position Sensorless BLDCM Commutation Error Based on Sign Detection被工业电子领域国际权威期刊IEEE Transactions on Industrial Electronics录用。该期刊是电气工程领域的最具影响力的期刊之一,当前影响因子 7.2,为 SCI一区 Top期刊,在控制科学、仪器仪表和传感技术等领域具有广泛学术影响力。论文第一作者为我院金浩副教授,第二作者为研究生申文宇,通讯作者为于连栋教授,以及北京航空航天大学郑世强教授,中国科学院数学与系统科学研究院赵延龙研究员,我校为第一署名单位和通讯单位。本研究工作由太阳集团tyc234cc、中国科学院数学与系统科学研究院与北京航空航天大学合作完成,得到国家自然科学基金、山东省自然科学基金以及山东省重点研发计划等多个项目的联合资助。
图 1 论文首页
无刷直流电机无位置传感器换相技术,以其低成本、高可靠性的优势,已成航天器控制力矩陀螺电机控制领域的关键技术,但其在应用方面仍面临挑战:控制系统中非理想环节引起的累积误差、电信号检测的抖动误差,以及电机运行过程中参数变化引入的误差,均会导致无位置换相控制精度降低,进而电机转矩恶化,能耗增加甚至造成电机失步或停转。为解决以上问题,团队在硬件电路上创新性地提出了基于电机虚拟中性点多路复用的误差量化设计,显著降低了电路复杂度与功耗,提高了系统可靠性;在控制算法方面,基于换相符号的低精度检测信息,创新性地引入了步长迭代自适应切换机制:换相误差大时采用指数递增步长快速检索和缩小误差,换相误差小时切换为指数收缩步长实现误差的高精度消除,遇阶跃干扰则自动重启检索,从而在低精度检测下保持强鲁棒性。该方法有效克服了低精度检测条件下传统方法适应性不足的局限实验结果表明,所提出方法显著降低了功耗与振动水平。该研究为无刷直流电机工程应用提供了重要的理论依据与技术支撑。
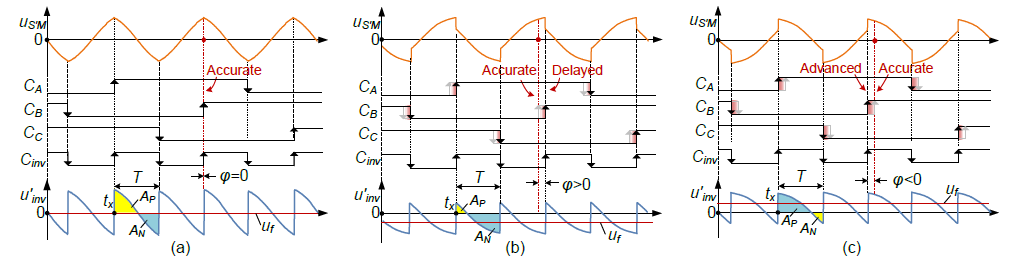
图 2 构造换相误差表征信号在换相准确、换相延迟和换相超前情况下的量化分析
所在于连栋教授团队长期从事3D宏观尺度坐标测量技术、高速磁悬浮电机控制技术、基于机器人的扫描跟踪测控技术、光学精密加工与测试技术和微纳传感技术研究。团队主持国家自然科学基金委重大科研仪器研制项目1项、国家重大科学仪器设备开发专项1项、山东省重点研发计划(重大科技创新工程)项目1项、国家重点研发计划2项、111学科创新引智基地计划项目1项、国家自然科学基金面上项目4项等;发表论文150余篇,授权中国发明专利90余项,国际发明专利1项;获省部级科技一等奖2项,二等奖2项,研究成果在相关领域获得国内外同行高度认可。
论文DOI: doi:10.1109/TIE.2026.3666025

 实验教学平台
实验教学平台 学校OA系统
学校OA系统 学校邮件系统
学校邮件系统 相关文件查询
相关文件查询